




































AIの進化と深く関わる自動運転
長野県塩尻市でレベル4自動運転バスが公道を走行——そんな未来を感じさせる映像を皮切りに登壇したのは、株式会社ティアフォーの飯田祐希氏だ。映像とともに語られたのは、自動運転が「いつか来る技術」ではなく、「すでに国内外で実装が始まっている」という現状だ。

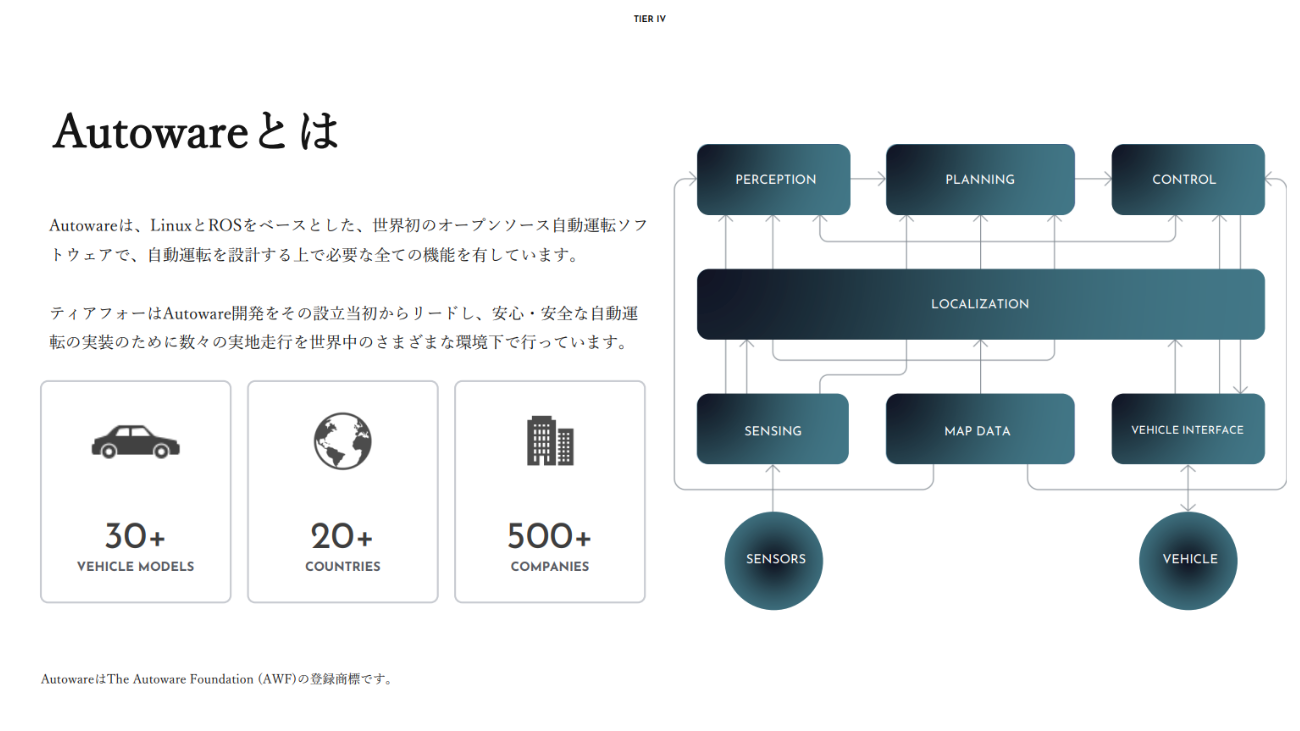
ティアフォーは2015年設立の自動運転ソフトウェア開発のスタートアップであり、自動運転用のオープンソースソフトウェア「Autoware(オートウェア)」の開発を主導する企業としても知られている。AutowareはLinuxおよびROS(Robot Operating System)をベースに開発された世界初の自動運転用オープンソースソフトウェアで、自動運転に必要なあらゆる機能を有している。現在では世界20以上の地域、500を超える企業や30種類以上の車両で利用されているという。
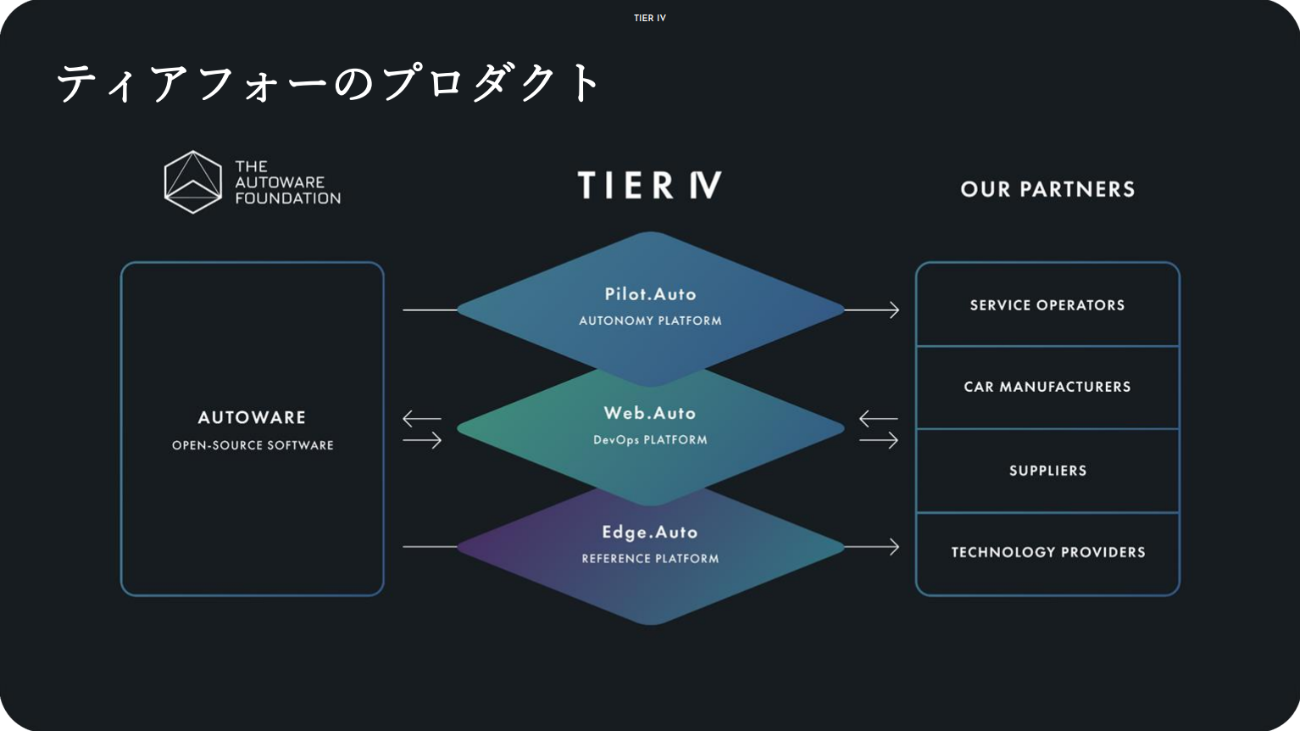
飯田氏は、「ティアフォーはAutowareを単なる技術ではなく、業界横断的な共通基盤=プラットフォームとして位置づけている」と語る。さらには「真のオープンソース化」を実現するため、2018年に運営母体となる非営利団体「The Autoware Foundation(AWF)」を設立した点も大きな特徴だ。
そんな飯田氏は現在、自動運転ソフトウェアプラットフォーム「Pilot.Auto」、自動運転開発運用プラットフォーム「Web.Auto」、自動運転リファレンスプラットフォーム「Edge.Auto」といった主要製品のプロダクトオーナーを務めている。
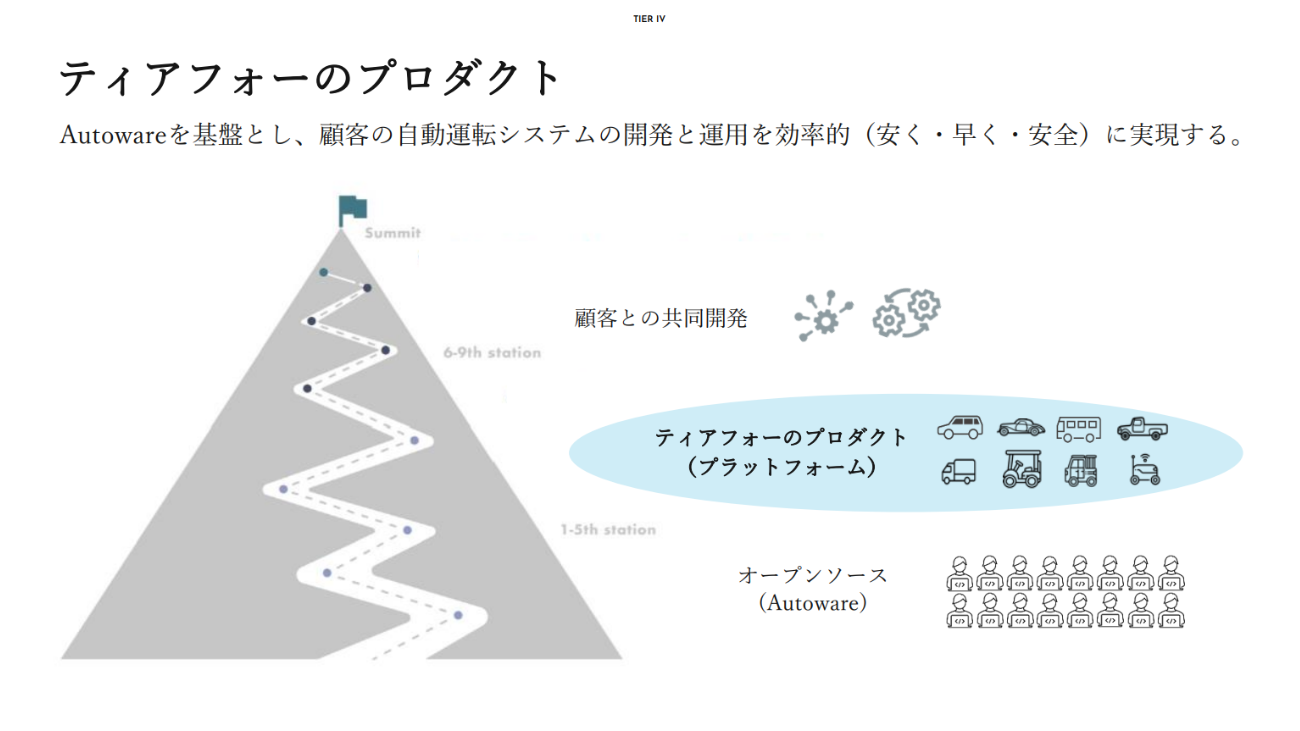
ティアフォーの事業構造は多層的だ。オープンソースソフトウェアのエコシステム形成の活動に加えて、企業向けライセンス提供やSaaSプラットフォームの開発、さらにはハードウェア販売や自動車メーカー支援までを手がけている。飯田氏はオープンソースソフトウェアを活用する利点を「富士山登山」にたとえる。Autowareが五合目、ティアフォーの製品が九合目、そして最後の山頂(社会実装)は顧客企業・パートナーと共に目指すという構図だ。
そんな自動運転は、今どこまで実用化が進んでいるのか。再び飯田氏が示したのは、JPN TAXIの車両をベースとした公道実証実験だ。
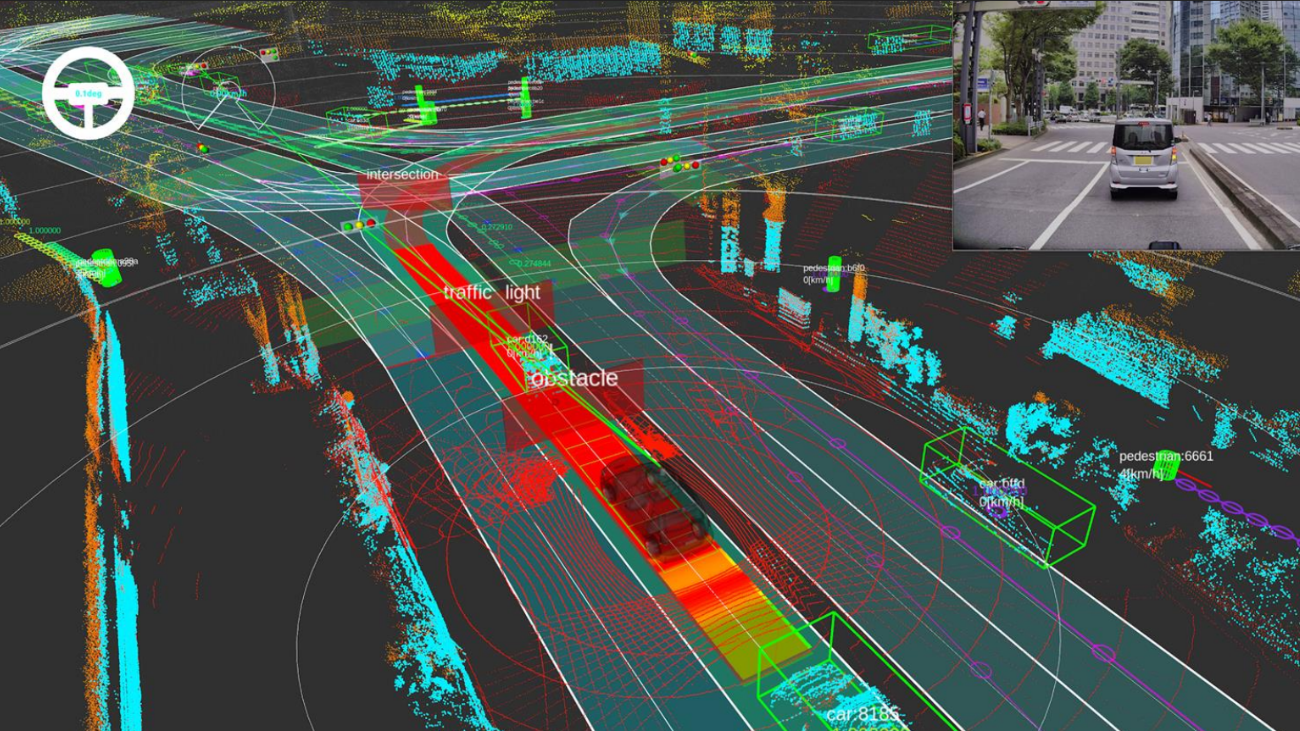
自動運転車両は、車載カメラに加えて、光の反射を利用して物体までの距離や形状を測定するLiDAR(ライダー)、さらに遠距離計測に強いミリ波レーダーといった複数のセンサーを組み合わせて環境をセンシングする。加えて、信号機や停止線、車線、電柱の位置などを記録した高精度3次元地図(HDマップ)も併用し、インフラ情報をもとに走行を制御している。
飯田氏は、こうした走行の裏側で行われている処理の概要をこう説明する。「センサーから得た情報をもとに、対象物が人か車かを識別する。さらに、時系列での位置変化から予測軌道を推定し、それに基づいて走行プランを構築する。最後に、車両を実際に動かす制御命令へと落とし込むのが、自動運転における処理の流れだ」。
そんな自動運転の分野では、自己位置推定機能、AIを活用した物体検出、軌道予測、モデル予測制御といった高度な技術が多用されており、各分野の専門家が連携してシステムを作り上げている。
さらには「開発アプローチにも変化が見られる」と飯田氏。かつて主流だったのは、条件分岐などで動作を制御する「ルールベース」方式だったが、現在はセンサーデータをそのまま処理して制御に変換する「End-to-End AI」の活用も進んでいるそうだ(代表例としてはテスラのFSD(Full Self-Driving)が挙げられる)。
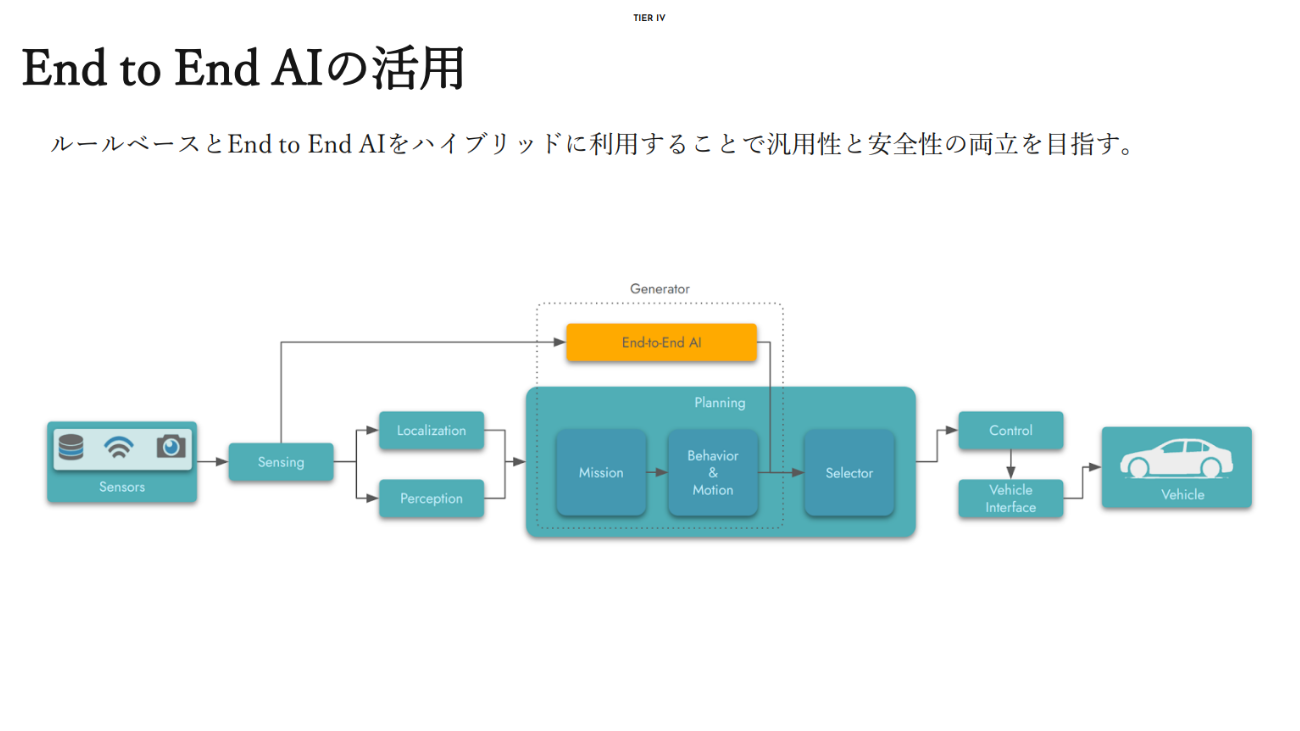
ただし、End-to-End AIは高い柔軟性と学習能力を備える一方で、処理の中身がブラックボックスであり、安全性の担保や説明性の観点で課題がある。
「そこで弊社では、End-to-End AIとルールベースを組み合わせたハイブリッドアーキテクチャを採用している。たとえば『この交差点でこういう動作は禁止』といった明確な制約はルールで制御し、基本的な判断、制御についてはAIを活かすというスタイルだ」(飯田氏)。
AIの柔軟性を活かしつつ、安全性と可用性を担保する構成こそが、インフラとしての自動運転を支えるために求められる設計思想なのだ。


